BIOMECHATRONIC HAND
An “ideal” artificial hand should match the requirements of prosthetics and humanoid robotics.
It can be wearable by the user which means that it can be perceived as part of the natural body and should replicate sensory-motor capabilities of the natural hand. However ,such an ideal bionic prosthesis is still far from reality.
This paper describes the design and fabrication of a novel artificial hand based on a “biomechatronic” and cybernetic approach. The approach is aimed at providing “natural” sensory-motor co-ordination, biomimetic mechanisms, force and position sensors, actuators and control, and by interfacing the hand with the peripheral nervous system.
INTRODUCTION
The objective of the work describe in this paper is to develop an artificial hand aimed at replicating the appearance and performance of the natural hand the ultimate goal of this research is to obtain a complete functional substitution of the natural hand. This means that the artificial hand should be felt by the user as the part of his/her own body and it should provide the user with the same functions of natural hand: tactile exploration, grasping and manipulation(“cybernetic” prosthesis). Commercially available prosthetic devices, as well as multifunctional hand designs have good reliability and robustness, but their grasping capabilities should be improved. The first significant example of an artificial hand designed according to a robotic approach is the Belgrade hand and the Utah hand which have achieved excellent results.These hands have achieved good performance in mimicking human capabilities, but there are complex devices requiring large controllers and their mass and size are not compatible with the strict requirements of prosthetic hands.
In fact the artificial hands for prosthetic application pose challenging specifications and problems, as is usually the case for devices to be used for devices to be used for functional replacement in clinical practice. These problems have forced the development of simple, robust, and reliable commercial prosthetic hand, s the Otto Brock Sensor hand prostheses which is widely implanted and appreciated by users. The Otto Brock Sensor hand has only one degree of freedom (DOF), it can move the fingers at proportional speed from 15-30 mm/s and can generate a grip force up to 100N.
According to analysis of the state of art, the main problems to be solved in order to improve the performance of prosthetic hands are
1) lack of sensory information gives to the amputee;
2) lack of “natural” command interface;
3) limited grasping capabilities;
4) Unnatural movements of fingers during grasping.
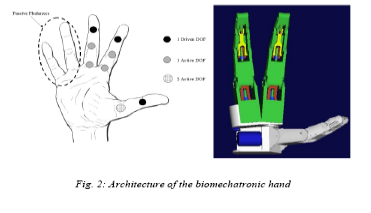
In order to solve these problems, we are developing a biomechatronic hand, designed according to mechatronic concepts and intended to replicate as much as possible the architecture and the functional principles of the natural hand.
The first and the second problem can be solved by developing a “natural” interface between the peripheral nervous system (PNS) and the artificial device(i.e., a” natural” neural interface (NI) to record and stimulate the PNS in a selective way. The neural interface is the enabling technology for providing the sensory connection between the artificial hand and the amputee. Sensory feedback can be restored by stimulating in an appropriate way user’s afferent nerves after characterization of afferent PNS signals in response to mechanical and proprioceptive stimuli.
Download the ppt and doc file-
thank you,,,,,,,,,,,,,,,,
BIOMECHATRONIC HAND
 Reviewed by Raj Tech Info
on
April 05, 2019
Rating:
Reviewed by Raj Tech Info
on
April 05, 2019
Rating:
Reviewed by Raj Tech Info
on
April 05, 2019
Rating:
No comments: